
Einführung
Ein Heißleiter oder NTC-Widerstand (englisch: Negative Temperature Coefficient Thermistor) ist ein Widerstand, dessen Widerstandswert bei steigender Temperatur abnimmt.
Die SMD-Version (Surface Mounted Device) eines NTC kann zur Messung der Temperatur eines maxon Motors verwendet werden.
Das SMD Bauteil hat den Vorteil, dass es direkt auf der Motorplatine platziert werden kann.
Der Nachteil ist, dass kein direkter Kontakt zur Wicklung besteht (im Vergleich zum PTC im EC 60). Dies führt zu einer höheren thermischen Zeitkonstanten (längere Verzögerung) und einem höheren thermischen Widerstand (niedrigere gemessene Temperatur). Die SMD-NTC auf einer Leiterplatte ohne direkten Kontakt zur Wicklung ist daher nur zur Überwachung im Dauerbetrieb geeignet und erfordert Tests in der Kundenanwendung. Für den drehenden Dauerbetrieb genügt ein Sensor. Für den Betrieb im Stillstand (Positionierung) sind zwei Sensoren erforderlich, um die Temperatur aller Wicklungen zu überwachen.
maxon Motoren mit integrierten NTC's
- EC frameless (Katalogstandard)
- ECX SPEED 16, 19, 20 (konfigurierbare Option)
Praktische Informationen über NTC
Der NTC Widerstand (Resistance NTC) ist keine lineare Funktion der Temperatur, wie man den beiden folgenden Kurven entnehmen kann (welche sich auf die NTC spezifischen R25 = 10 kΩ und Beta 25..85 = 3490 K beziehen). Selbst bei einem eingeschränkten Temperaturbereich (z.B. von 0 bis 50 ° C), kann die Funktion kaum durch eine Gerade angenähert werden. Wie zuvor erläutert, nimmt der Widerstand eines NTC mit steigender Temperatur ab.
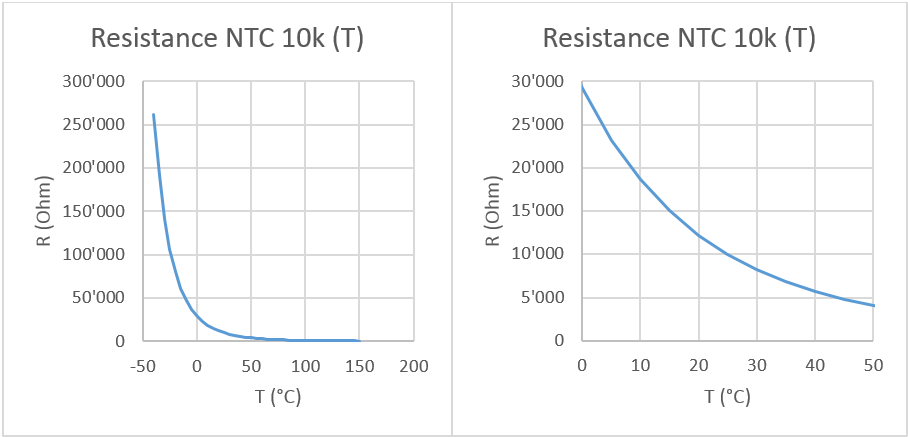
NTCs haben zwei spezifische Werte: den Nennwiderstand R25, welcher dem Widerstandswert bei 25 °C (T25 = 25 °C = 298.15 K) entspricht, und das konstante beta, das irgendwie den "Temperaturkoeffizienten" darstellt. Der Beta-Wert ist für einen bestimmten Betriebsbereich optimiert, z.B. 25°C..85°C.
Mit diesen Parametern kann die Temperatur wie folgt berechnet werden: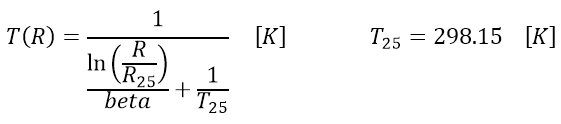
Mit:
- beta: Konstante (Temperaturkoeffizient) optimiert für den Betriebsbereich des Motors (Katalogwert)
- R25: Nominaler Widerstand bei Standardtemperatur R25 (Katalogwert)
- T25: Standardtemperatur von 25 °C (298.15 K)
Diese Tabelle kann verwendet werden, um zu sehen wie sich der Widerstand mit der Temperatur ändert: NTC Calc Sheet 20150706.xlsx
NTCs sind wegen ihrer niedrigen Kosten und ihrer Verfügbarkeit in vielen Größen und Formen weit verbreitete Temperatursensoren. Mit modernen Mikrocontrollern ist es einfach, die oben beschriebene Gleichung zu programmieren und direkt einen Wert in °C (oder einer anderen Temperatureinheit) zu erhalten, ohne dass komplexe analoge Linearisierungsschaltungen erforderlich sind.
Es gibt jedoch Nachteile, die erwähnt werden sollten:
- Der Arbeitstemperaturbereich ist auf etwa -50 bis +150 ° C begrenzt. Dies hängt natürlich vom jeweiligen NTC Modell ab. Da die Mehrheit der NTCs Silizium verwenden, können diese Grenzwerte nicht überschritten werden.
- Aufgrund der logarithmischen Widerstands-Änderung ist die Genauigkeit umso geringer, je grösser der von der Schaltung akzeptierte Temperaturbereich ist.
NTCs sind in der Regel nicht werkseitig kalibriert: Das tatsächliche R25 und Beta kann vom einen zum anderen NTC variieren und für absolute Temperaturmessungen ist immer eine Art von Schaltungsanpassung erforderlich.
Eine letzte Anmerkung: Wenn ein NTC als Temperatursensor verwendet wird, sollte man darauf achten, dass nicht zu viel Stromdurch den NTC fließt, da der Strom den NTC erwärmt und einen Messfehler verursacht. Aus diesem Grund sind hochohmige NTCs (10 kΩ oder mehr) für Thermometer besser geeignet.
Zwei NTC's in EC frameless Motoren
Bei EC frameless Motoren werden zwei parallel geschaltete NTCs verwendet, um eine Indikation der Wicklungstemperatur zu erhalten:
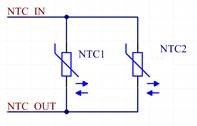
In dieser Konfiguration sind NTC1 und NTC2 unter zwei verschiedenen Motorwicklungen auf der Leiterplatte angeordnet.
Bei rotierendem Dauerbetrieb haben beide NTCs die gleiche Temperatur. Der gemessene Widerstand zwischen NTC IN und NTC OUT ist:
![]()
Somit kann mit der Formel T (R) = ... von oben die Temperatur für diese Betriebsart berechnet werden.
Im Stillstand (Positionieraufgaben) messen die beiden Sensoren unterschiedliche Temperaturen. Der Gesamtwiderstand geht in Richtung des tieferen (kritischen) Einzelwiderstandes. Zur Ermittlung der Temperatur sollte somit nur die Hälfte vom gemessenen Gesamtwiderstand verwendet werden.

Kommentare
0 Kommentare
Zu diesem Beitrag können keine Kommentare hinterlassen werden.