
Topic:
Autotuning leads to stable control parameters in most cases, but for some specific application requirements it may sometimes be desired to further optimize these results.
- Are there any "best practice" hints present how the automatically determined control parameters can be further optimized, e.g. to achieve a higher dynamic (= more aggressive control behavior) or to better suppress oscillation tendencies in case of varying load or friction?
Basics:
How to change ESCON's control parameters manually?
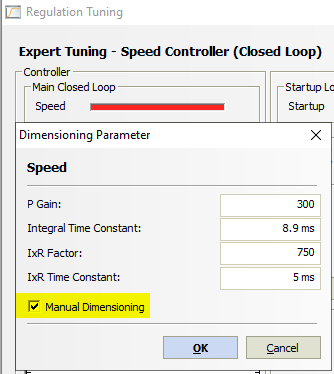
ESCON Studio offers "Auto Tuning" and "Expert Tuning" by its "Regulation Tuning" wizard. If you want to set or modify any control parameter manually, you have to select "Expert Tuning" ...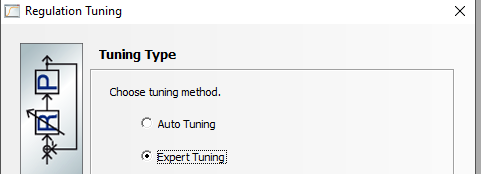
... and select the operating mode resp. controller mode to adapt its control parameters: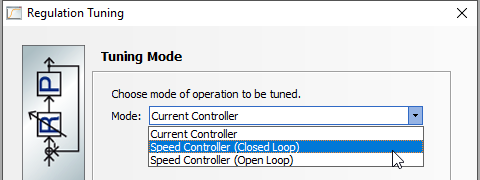
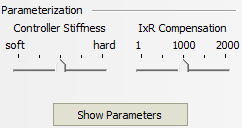
The control parameters can be modified manually by ...
- ... moving the sliders
- ... clicking the "Show Parameters" button, marking the checkbox "Manual Dimensioning" and adapting the control parameter values manually.
Important:
- Press the "Start" button of the "Expert Tuning" window to see the result of the modified parameters by the graphics.
Remark:
In case of moving the sliders it is mandatory to press "Start" button to ensure that the parameters are adapted according to the slider's position. - Finally press the "Finish" button to keep the modified control parameters!
Solution:
Modifying "Speed control (Closed loop)" parameters manually
- Execute "Auto Tuning" initially.
- If the controller is not "aggressive" enough (e.g. low frequency oscillations, slow reaction to keep the speed in case of load changes, ...):
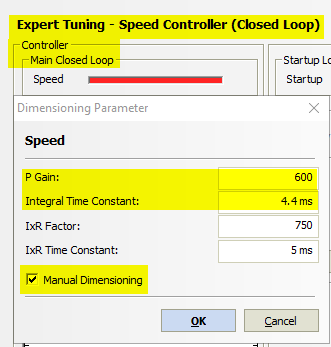
- Define a free scaling factor "k" larger than 1.
'k' is no ESCON parameter but a multiplication / divisor factor in use by the following manual "P Gain" and "Integral Time Constant" adjustment formulas.
Initial suggestion: Use k = 2 - Multiply "P Gain" by k
- Multiply "Integral Time Constant" by 1/k
- Example:
- Define a free scaling factor "k" larger than 1.
- Check the control performance based on the modified parameters by pressing the "Start" button.
- Return to step 2 if control performance is not yet satisfying. Adapt the scaling factor "k" again.
- If control performance satisfies your needs, press the "Finish" button to keep the modified parameters.
Additional notes:
- In general, the roles of the PT control gains may be described as follows:
- "P Gain"
= The main working horse - "Integral time constant"
= Determines the slew rate but causes oscillations if the duration is too short.
- "P Gain"
- By multiplying the gains by identical powers of the scaling factor "k" (resp. "1/k"), the balance between the gains is maintained. Just vary the power of "k" by each update and check its impact until the control performance fulfills your requirements.
What about "Current control" parameters?
- In general, the current controller does not need to be modified when manually tuning the velocity controller. However, with slotted motors and especially with EC-i motors the aggressiveness of auto tuned current control parameters may be relatively low. In this case, if the user wants to increase the gains of the velocity controller, then it is recommended to increase the "Current controller" gains by moving its tuning slider to the right beforehand.
Press the "Start" button then and finally press the "Finish" button to keep this modified "Current controller" configuration before you start to modify the "Velocity Controller" parameters.
What to do if Auto Tuning already fails?
- Control experts might be able try a manual tuning based on the so-called "Ziegler and Nichols" method. Please find some basic explanation about this method by the following 3rd party links:
maxon cannot provide any warranty or assistance for the information shared by these 3rd party links. Anyway this might be just a possible solution for control engineers and demands for some add-on equipment to evaluate the system's reaction precisely.
- Quite often some mismatching motor, encoder, system data configuration, or a load with a high inertia or even the power supply are typical causes of failed "Auto tuning". maxon's Support team is open to check such details and provide some hints then. Please submit a support ticket in this case and provide the following information:
- Part number of your motor combination in use
- Your ESCON's *.edc configuration file
(-> ESCON: Export / Upload of the configuration in an *.edc file) - Screenshot of the error message present by Auto Tuning.
- ESCON's supply voltage
plus(!) the data sheet or website link of the power supply in use. - Some photos of the mechanics driven by the motor and the wiring of the ESCON and motor.
- If there is load with a high inertia (e.g. disc) in use, please provide some drawing of the load and let us know its inertia or its weight and dimensions.
Cross reference:
If you are looking for some hints about manual optimization of maxon EPOS4's control parameters, please check this linked Support Center document:
-> EPOS4 / IDX: Manual control parameter tuning hints
Comments
0 comments
Article is closed for comments.