
Speed control with "Static IxR compensation"
In case of Speed Control (Open Loop) with "Static IxR compensation", the necessary motor voltage is determined based on ...
- ... the "Speed constant" configured by ESCON Studio's "Startup wizard"
- ... the motor current permanently measured internally by the ESCON
- ... the winding resistance of the motor determined during controller tuning.
Important:
- For the correct function of the speed controller operation it is mandatory that the "Speed constant" of the motor has been configured correctly and a controller tuning has been performed.
The winding resistance is automatically measured during the controller tuning.
For a brush DC motor without tachometer and without encoder, "Speed controller (Open Loop)" with "Static IxR Compensation" is used. The speed controller supplies the motor with a voltage that corresponds to the specified SET value speed. The conversion from speed to voltage is processed internally in the controller by means of the configured motor's "Speed constant" kn (which is specified by the motor's data sheet). If the load on the motor increases, its speed would decrease. The "Static IxR Compensation" increases the motor voltage with increasing motor load (i.e. increasing motor current) and thus counteracts a drop in speed.
Limitations:
- For speed controller operation with "Static IxR Compensation", it must be taken into account that the "Speed constant" as a specified catalog value may have a tolerance of +/-10%. This tolerance can therefore also lead to a deviation between the actual speed compared to the commanded set value speed. Based on comparative measurements of the actual speed (with an external tachometer on the motor shaft) in relation to the set value speed, a corrected speed constant can be determined and configured.
- In case of low speed operation or motors with a quite steep (= high) "Speed constant" value, Speed controller (Open Loop) with "Static IxR compensation" is only suitable to a limited extent. The actual speed value might not match quite well with the set value in such a case.
Speed control with "Adaptive IxR compensation"
For brush DC motors with tacho or encoder or brushless EC motors, the operating modes "Speed Controller (Closed Loop)" or also "Speed controller (Open Loop)" with "Adaptive IxR Compensation" can be configured for dynamic load compensation despite speed signal with low resolution (e.g. for EC motor only with Hall sensors).
The basic principle of the speed controller with "Adaptive IxR compensation" is identical to that of the speed controller with "Static IxR compensation" described above, i.e. the controller supplies a motor voltage that corresponds to the commanded set value speed based on the motor's "Speed constant" kn.
The "Adaptive IxR Compensation" increases the motor voltage with increasing motor load, but also takes the winding temperature into account. The compensation is adapted to the temperature-dependent terminal resistance R of the motor. As the motor current increases with higher load, the motor heats up, which affects its winding resistance. This increases linearly according to the thermal resistance coefficient for copper (0.039 K-1).
With "Adaptive IxR Compensation", the resistance change dependent on the heating is estimated and corrected by an algorithm using a speed sensor (= Hall sensors, encoder, or tachometer). This results in a more accurate actual speed than with "Static IxR compensation".
Additional notes:
- For applications with precise speed requirements or operation in the low speed range, the use of a motor combination with an encoder (with at least 500 cpt.) and selection of the "Speed Controller (Closed Loop)" operating mode is recommended.
- The "strength" of the "IxR Compensation" can be influenced in the operating mode "Speed Controller (Open Loop)" by ESCON Studio's "Controller Tuning / Expert Tuning" via the slider "IxR Compensation" or the button "Show Parameter" and the setting of the "IxR Factor":
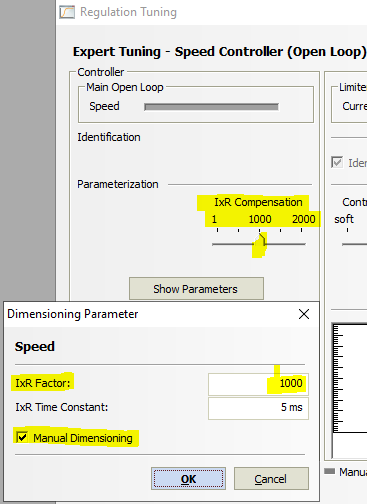
After an adjustment of any setting the button "Start" and finally "Exit" must be pressed to accept the configuration.
Comments
0 comments
Article is closed for comments.