
Der Inhalt dieses Support Center Dokuments steht aktuell nur auf Englisch zur Verfügung!
Topic:
The EPOS4 offers an automatic "Holding brake" control which can be configured as a digital output function. The output signal automatically powers the brake (= opens it resp. release the motor shaft) then in case the power stage and control is enabled.
The following information provides a more "deep inside" discussion (than present by the "EPOS4 Firmware Specification") about some aspects of the brake and power stage control when "Enable" is commanded by the master until the brake is finally open.
Technical background:
Configuration:
The assignment of the "Holding brake" functionality is typically processed during initial commissioning of the EPOS4 by EPOS Studio's "Startup" wizard. The characteristics of the brake's "opening" and "closing" delay is also configured then based on the brake's data sheet, e.g. 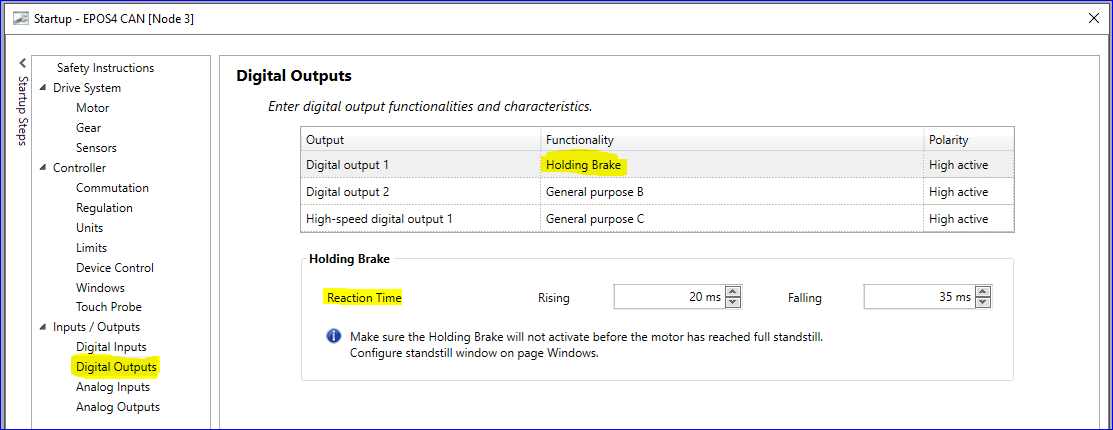
Instead it is also possible by a master's application code to configure the "Digital output configuration" (Object 0x3151) and the "Holding brake parameters" (0x3158). Please find the detailed information about these objects by the "EPOS4 Firmware Specification".
Detailed look on EPOS4's brake and power stage and control enable procedure:
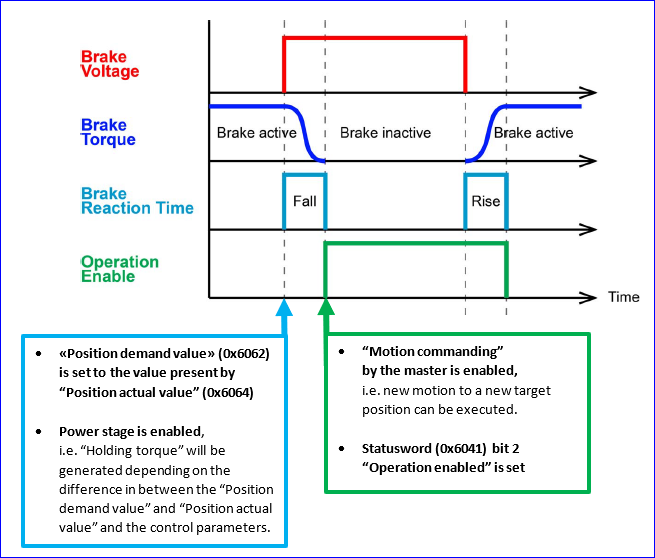
The term "Operation enable" used by the graphics (present by the "EPOS4 Firmware Specification") might be misunderstood and does not clearly state the power stage and control state immediately when the brake voltage is applied. The following comments might help to get a more comprehensive understanding of the different action steps processed during automatic “Holding brake” control sequence in case of the brake is released:
- The power stage is enabled immediately(!) when the brake is commanded to release, i.e. the brake voltage is applied. The "Position demand value" (0x6062) is set to the value of the "Position actual value" (0x6064) at this point of time too.
- The term "Operation enable" present by the action graph refers to bit 2 "Operation enabled" of the Statusword (0x6041), i.e. the controller and power stage is ready to process an updated motion command by the master (i.e. move to a new target position) at this point of time.
Possible drive's reaction in case of a vertical axis or an external force:
If there is a vertical axis in use (or some external force present) and the gear or mechanics is not self-locking, the drive’s output shaft might slightly move (e.g. drop in case of a vertical axis) while the brake is released although control is active immediately when the “brake voltage” is applied and “Position demand value” corresponds to “Position actual value” at start of the brake opening process.
Such a slight “unexpected” drive shaft movement during / after opening the brake is a normal behavior seen by almost any control (typically in case of lift applications) because control can just react if there is difference (= “Following error actual value”, 0x60F4) present in between the “Position actual value” (0x6064) and the “Position demand value” (0x6062) is present. Initially there will be some drive shaft movement possible before control can react (based on the detected increasing “Following error actual value”) and the drive shaft moves back to its “Position demand value” (= initial “Position actual value”) afterwards. This will be just some minor motion but it can be observed by the "Position actual value" (0x6064).
The drive shaft movement during / after brake release depends on different impacting factors like …
- External force
(e.g. load in case of vertical axis resp. lift application) - Friction or even self-locking of the drive’s mechanics
- Control parameter’s configuration (resp. tuning)
Known measures to reduce the drive shaft’s reaction (= motion) at brake release are:
- Using a drive train with increased friction or even self-locking.
The drawback by increased friction or self-locking means on the other hand that the efficiency of such drive train's is lower (i.e. there is more power required to move the same load). This also reduces the operating time of battery powered systems. - Optimized control parameters.
Even in case of perfectly optimized control parameters there will be still some slight reaction (= drive shaft motion) present when the brake is released and control has to react on an external force (resulting in a detected “Following error actual value”). - Applying / configuring some “Torque offset”
- If “Torque offset” is processed depends on the “Operating mode” resp. control cascade in use.
- The required “Torque offset” depends on the load. If the “Torque offset” is too high, it might be possible that the drive even moves in the other direction than expected (e.g. upwards in case of a lift). A correct applied “Torque offset” (esp. in case of varying loads) demands for some load (resp. external force) information to adjust it properly by an additional algorithm each time.
Conclusion:
There is no(!) simple solution present to get rid of such slight drive shaft motion during brake release of a vertical axis application or due to some external force. Control reacts quite quickly but there is still some initial motion (e.g. drop of a vertical axis) required resulting in a "Following error actual value" which is detected by control. The improvement or success of any possible measures depend on the concrete mechanics. It even gets more complicated if varying loads (resp. external forces) might be present each time the brake opens up.
Cross reference:
Kommentare
0 Kommentare
Zu diesem Beitrag können keine Kommentare hinterlassen werden.