
Der technische Teil dieses Support Center Dokument (-> "Lösung") steht aktuell nur auf Englisch zur Verfügung!
Thema:
Das Autotuning führt in den meisten Fällen zu stabilen Reglerparametern, aber bei spezifischen Anwendungsanforderungen kann es manchmal gewünscht sein, diese Ergebnisse weiter zu optimieren.
- Gibt es zusätzliche Hinweise aus der Praxis wie die automatisch ermittelten Reglerparameter weiter optimiert werden können, z.B. um eine höhere Dynamik (= aggressiverer Regler) zu erreichen oder Schwingungsneigungen bei wechselnder Reibung oder Last besser zu unterdrücken?
Grundsätzliche Anmerkungen:
- Die Parameter der Drehzahl- und Lageregelung (= "Velocity Control" und "Position Control" hängen von der Last des Motors ab.
- Insbesondere im Falle eines Direktantriebs (d.h. eines Motors ohne Getriebe) oder ohne hohe Getriebeübersetzung sollte das "Regulation Tuning" des Drehzahl- und Lagereglers mit der im späteren Einsatzfall vorhandenen Last an der Motor- bzw. Getriebeausgangswelle durchgeführt werden.
- Bei Motorkombinationen mit hohen Getriebeübersetzungen (über 100:1 und gleich oder mehr als 3 Stufen) hat die Last keinen nennenswerten Einfluss und das "Regulation Tuning" ohne Last liefert in den meisten Fällen stabile Regelparameter unabhängig von der später vorhandenen Last.
- Es gibt kein einfaches "Ja" oder "Nein", was sind die besten Regelparameter?
Letztlich hängt dies auch von den gezielten Bewegungsanforderungen einer Anwendung ab:- In manchen Fällen steht eine schnelle dynamische Reaktion im Vordergrund und ein gewisses Überschwingen kann akzeptiert werden.
- In anderen Fällen muss ein Überschwingen vermieden werden und der Motor sollte die "Zielposition" ziemlich genau und fast ohne Überschwingen oder Oszillation anfahren.
- Manchmal sind auch hörbare Geräusche aufgrund der Mechanik (oder Resonanzfrequenzen) ein Thema, das optimiert werden muss. In diesem Fall können weiche, aber weniger dynamische Parameter im Vordergrund stehen (d.h. die P-Verstärkung muss eventuell stark reduziert werden).
Lösung:
Die nachfolgenden Hinweise stehen nur in Englisch zur Verfügung.
I.) Current control parameters
In general, the current controller does not need to be modified when manually tuning the velocity or position controller.
- In case of slotted motors and especially with EC-i motors the aggressiveness of the autotuned current controller may be relatively low. In this case, if the user wants to increase the gains of the position and/or velocity controller, then it is recommended to also increase the current control gains (by moving the tuning slider to the right) beforehand.
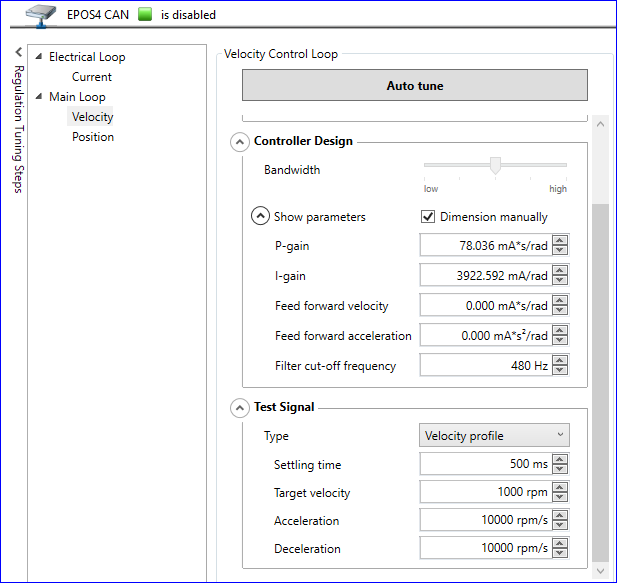
II.) Single loop Velocity Control with low pass Filter"
Initial action:
If observer was initially chosen, then switch to low pass filter.
Next action steps:
1. Execute autotuning initially.
2. Feedforward parameter modification (during manual tuning):
- Write down feedforward values
= keep the autotuned feedforward values in mind to set the identical values after manual tuning is finished later on. - Set feedforward values to zero
3. Select your "manual tuning" strategy depending of your aim:
- If the controller is not aggressive enough (e.g. low frequency oscillations, large following error), define scaling factor “k” larger than 1 (suggestion: 2)
- If the controller is too aggressive (e.g. high frequency oscillations),
define scaling factor “k” between 0 and 1 (suggestion: 0.5)
4. Modify the autotuned parameters
- Multiply P-gain by k
- Multiply I-gain by k^2
- Multiply lowpass "Filter cutoff frequency" by k
(This value is just present and can be adjusted by FW >= 0x170 only!)
5. If control performance is not yet satisfying, return to step 3.
Otherwise restore values of feedforward gains and stop.
III.) Single loop position control
1. Execute autotuning initially.
2. Feedforward parameter modification (during manual tuning):
- Write down feedforward values
= keep the autotuned feedforward values in mind to set the identical values after manual tuning is finished later on. - Set feedforward values to zero
3. Select your "manual tuning" strategy depending of your aim:
- If the controller is not aggressive enough (e.g. low frequency oscillations, large following error), define scaling factor “k” larger than 1
Initial suggestion: k = 2 - If the controller is too aggressive (e.g. high frequency oscillations),
define scaling factor “k” between 0 and 1
Initial suggestion: k = 0.5 - Remark:
'k' is no EPOS4 parameter but a multiplication factor in use by the following manual "P-Gain", "I-Gain", and "D-Gain" adjustment formulas.
4. Modify the autotuned parameters
- Multiply P-gain by k^2
- Multiply I-gain by k^3
- Multiply D-gain by k
5. If control performance is not yet satisfying, return to step 3.
Otherwise restore values of feedforward gains and stop.
Additional notes:
- In general, the roles of the PID control gains may be described as follows:
- Proportional gain: The main workhorse.
- Integral gain: Compensates constant too low-frequency disturbances, but causes overshoot and oscillations if too large.
- Derivative gains: Compensates high-frequency disturbances, but causes vibrations if too large.
- In general, the feedforward gains do not need to be modified after autotuning.
- During manual tuning it is recommended to set the feedforward gains to zero because, in this way, the effect of the manual modifications is much easier to evaluate.
- Finally the initially autotuned (and kept in mind) feedforward values have to be set again after manual tuning are finished.
- By multiplying the gains by different powers of the scaling factor “k”, the balance between the gains is maintained.
-
It is possible to right-click into the graphics (present after tuning) to ...
-
... activate a cursor.
The cursor gives a better chance to check the concrete values of the recorded data. -
... save the recorded data as a *.csv file (which can be checked by Excel or loaded by EPOS Studio's "Data Recorder" tool) later on again.
If you want to share tuning results or generally any EPOS Studio "Data Recording" with us, we prefer to get these .csv files plus the EPOS4 resulting *.dcf configuration file (-> EPOS / IDX: Export der Parameter-Konfiguration in eine *.dcf Datei).
-
Special cases:
- In case of a high inertia and some quite specific mechanical system designs tending to strong oscillation during tuning and operation, the P gain might have to be strongly reduced finally (e.g. even by a factor of 100 or more).
- If autotuning fails and the user does not have an initial set of gains to work with, then they may follow a manual tuning algorithm like the one by Ziegler and Nichols.
Example:
EC45flat (P/N: 251601) + gear GP23C (P/N: 166931) plus some conveyor belt with strongly differing friction.
- Initial state after autotuning. The conveyor belt has some unsteady friction resulting in some unsteady oscillation.
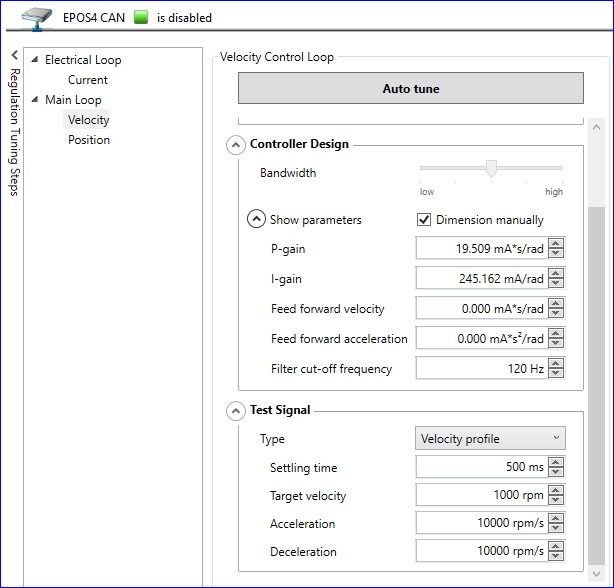
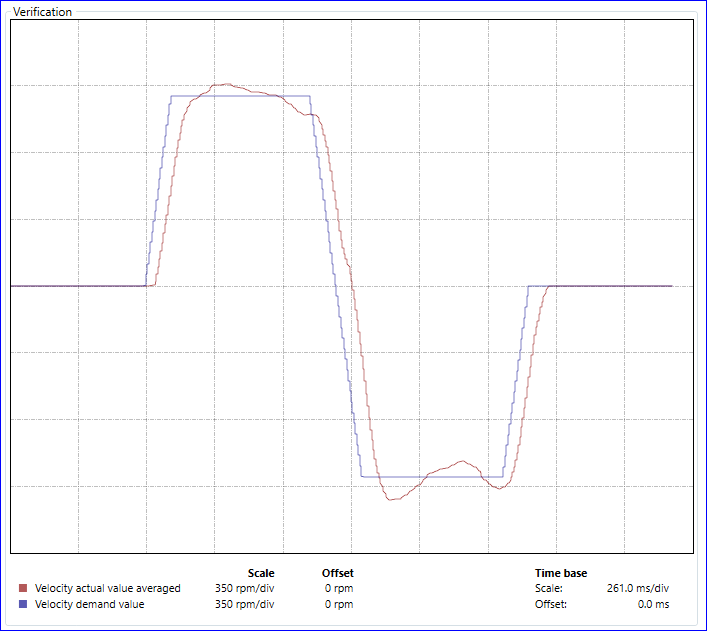
If you want to reduce this oscillation, the gains have to be increased. - Applying some scaling of k = 2 to the gains based on the rules of "Single loop velocity control" above, i.e. P-gain = P-gain * 2, I-gain = I-gain x 4)
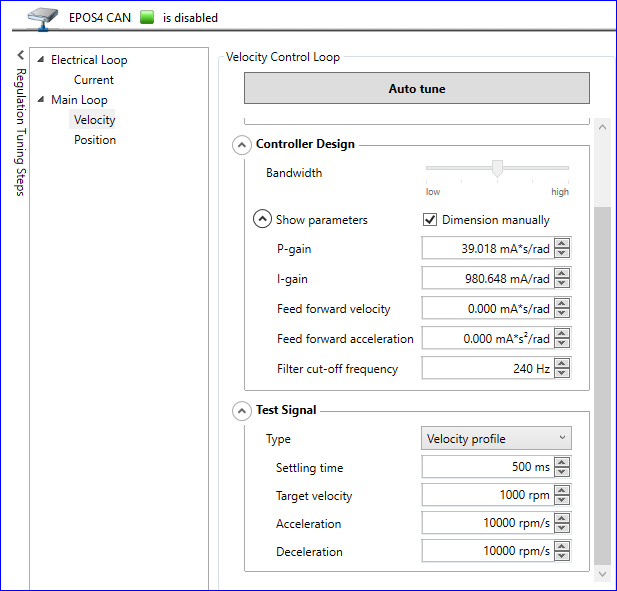
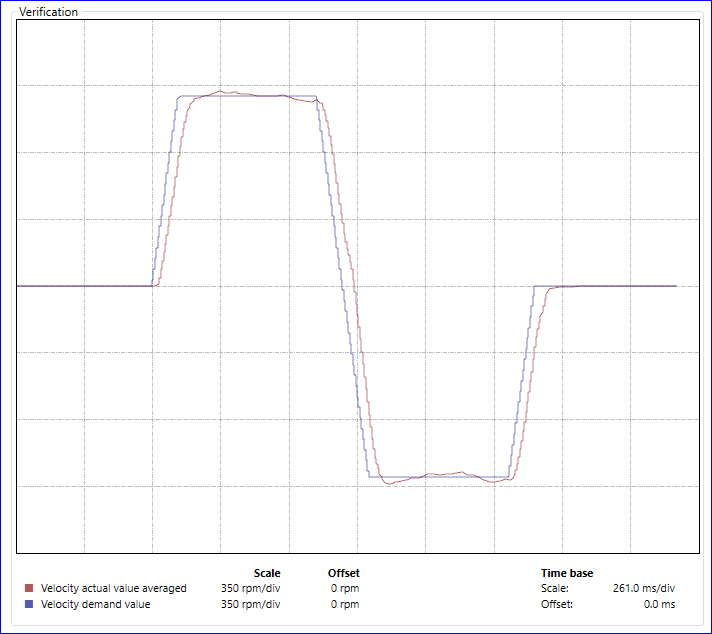
- Applying a scaling factor of k = 2 once more again:
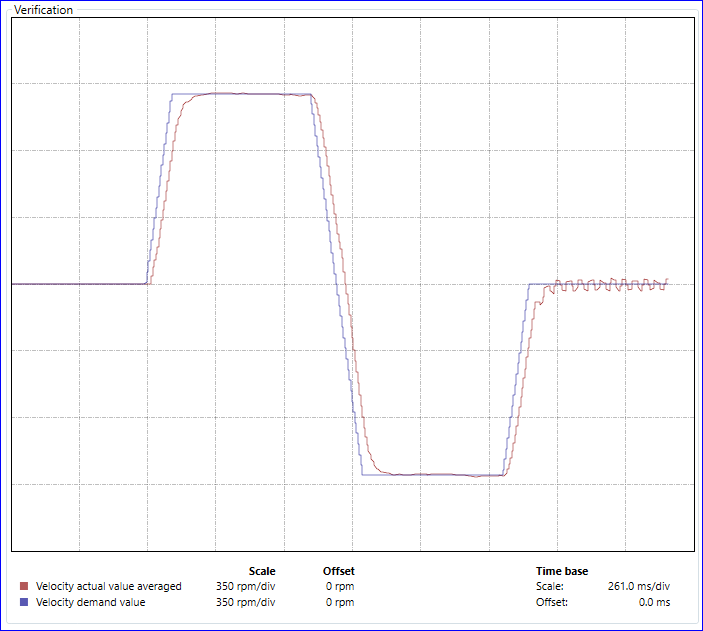
The control error has become even smaller but now the system oscillates at a speed value of 0 rpm. Finally it will be the decision of the system designer whether the oscillation at 0 rpm can be tolerated (e.g. because the control might be disabled at 0 rpm anyway) or the control parameters of the manual tuning step before are satisfying for the application.
Querverweis:
Hinweise zur manuellen Optimierung der Regelparameter der maxon ESCON-Produktlinie finden sich unter dem folgenden Support Center Dokument Link:
-> ESCON: Tipps für das manuelle Optimieren der Reglerparameter
Kommentare
0 Kommentare
Zu diesem Beitrag können keine Kommentare hinterlassen werden.