
Thema:
- Was ist eine "Dual Loop Regelung"?
- Was ist der Vorteil einer "Dual Loop Regelung"?
- Wie funktioniert die EPOS4 "Dual Loop Regelung"?
- Wie wird eine "Dual Loop Regelung" konfiguriert?
Grundlagen der "Dual Loop Regelung"
Die Positionierung von mechanischen Lasten wird typischerweise mit einer PID Positionsregelung ausgeführt, bei welcher ein Encoder auf der Motorwelle als IST-Wertgeber dient.
Bei Anwendungen, in denen Getriebe, Spindeln oder Antriebsriemen zur Übertragung der Bewegung der Motorwelle auf die Last verwendet werden, kann das Getriebespiel oder Elastizitäten dieser mechanischen Elemente eine negative Auswirkung auf die Reaktionsfähigkeit und Positioniergenauigkeit der Last haben oder im Extremfall sogar zu einem Schwingen der Last um die Zielposition führen. Diese Effekte können mit einer sogenannten "Dual Loop Regelung" bei den meisten Systemen eliminiert werden. Bei der "Dual Loop Regelung" wird hierzu ein zusätzlicher, an der Abgangsseite montierter Encoder in den Regelkreis mit einbezogen um die Lastposition zu erfassen.
Sowohl der Encoder am Motor als auch der Encoder an der Last werden bei einer "Dual Loop Regelung" als IST-Geber verwendet um die Reaktionsfähigkeit und Positioniergenauigkeit der Lastbewegung zu erhöhen und negative Effekte aufgrund von nicht idealen Eigenschaften (Spiel, Elastizität) des mechanischen Systems auszublenden.
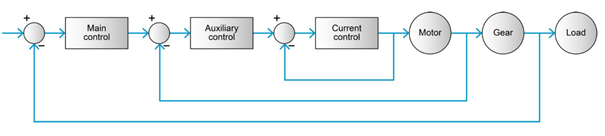
Effektiv sind eigentlich drei Regelkreise (inkl. dem Stromregel-Kreis) vorhanden. Der Begriff "Dual Loop Regelung" bezieht sich jedoch nur auf die beiden Regelkreise, welche einen Encoder auf der Lastseite (-> "Main control") und einen Encoder auf der Motorwelle (-> "Auxiliary control") nutzen.
Vertiefte Einblicke in die "Dual Loop Regelung" der EPOS4?
In den folgenden Dokumenten finden sich detailliertere Informationen zu der EPOS4 "Dual Loop Regelung":
- Angehängte deutsche und englische Version eines Fachartikels.
- Kapitel "10 Dual Loop Control" der "EPOS4 Application Notes Collection".
Empfohlene Encoder-Auflösungen:
- Encoder an der Motorwelle
Der Encoder, welcher steif mit der Motorwelle verbunden ist dient einerseits als IST-Positionsgeber für die Sinus-Kommutierung (= FOC, Field Oriented Control) bei bürstenlosen Motoren wie auch als Geber für den inneren Regelkreis der Dual Loop Regelung. Als allgemeine Empfehlung gilt für den diesen auf der Motorwelle montierten Encoder eine Auflösung von mindestens 500 cpt. Häufig wird auch 1024 cpt. als Standard verwendet. - Encoder an der Lastseite
Als allgemeine Grundlage gilt die Daumenregel eine Encoder-Auflösung zu wählen, die 2 - 4 mal grösser ist als die anwendungsseitig geforderte Positioniergenauigkeit der Last.
Beispiel 1:
Falls eine lastseitige Positioniergenauigkeit von 0.1° gefordert ist sollte der Encoder, welcher bei der Last oder Ausgangswelle der Antriebseinheit montiert ist eine Auflösung von mindestens 0.025°... 0.05° besitzen. Dies erfordert typischerweise den Einsatz eines Inkremental-Encoders mit typ. 2048 oder 4096 cpt. oder eines Absolut-Encoders mit 13 oder 14 Single Turn Auflösung.
Beispiel 2:
Falls bei einer Linearachse eine Positioniergenauigkeit von 0.1° gefordert ist, sollte bei Einsatz eines Linearmassstabs dieser eine Auflösung von typisch 0.025 ... 0.05 mm besitzen.
In dem folgenden verlinkten Support Center Dokument finden sich weitere Informationen zur Encoder-Auswahl und weiteren Aspekten:
Konfiguration des "Dual Loop Systems"
Die Konfiguration der Encoder und der Getriebeübersetzung, welche in einer "Dual Loop Regelung" verwendet wird, kann sehr einfach über den EPOS Studio's "Startup" Wizard konfiguriert werden.
- Die gesamthafte Getriebeübersetzung zwischen dem Encoder auf der Motorwelle und dem Encoder auf der Lastseite muss exakt(!) konfiguriert werden.
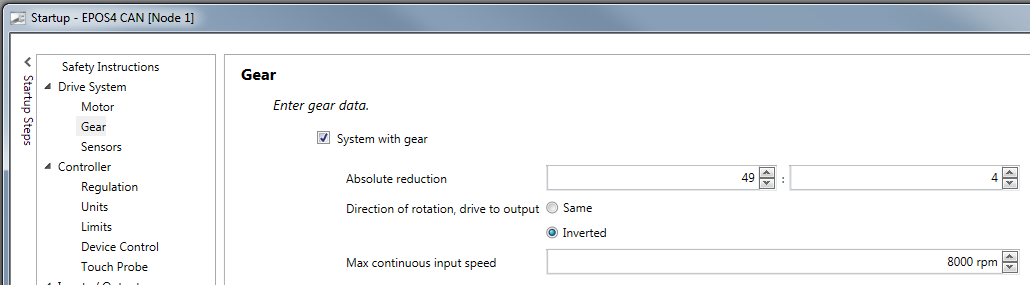
Es muss auch beachtet und entsprechend konfiguriert werden, ob aufgrund der Mechanik und des Getriebes zwischen den beiden Encodern eine Drehrichtungsänderung auftritt. - Die Encoder, welche auf der Motorwelle (= "On motor shaft") und Lastseite (= "On gear") eingesetzt werden, müssen entsprechend den technischen Daten konfiguriert werden (d.h. Encoder-Typ, Auflösung, etc.).
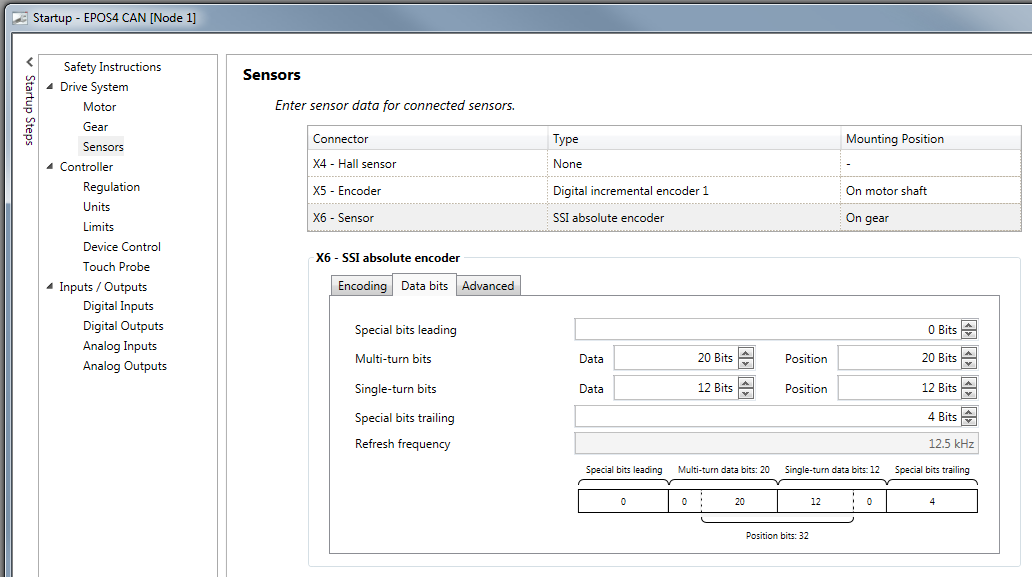
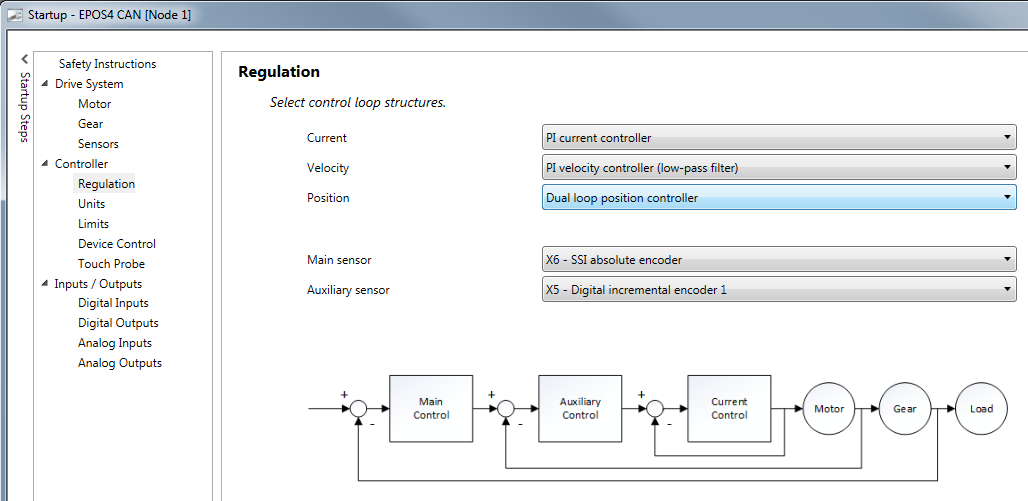
Es können "Digital-inkremental Encoder", "Analog-inkremental Encoders (Sin/Cos)" oder "SSI Encoder" ausgewählt und der Motor- oder Lastseite zugewiesen werden. - Es muss "Dual loop position controller" ausgewählt werden.
Ermittlung der "Dual Loop" Reglerparameter
Die EPOS4 Inbetriebnahme-Software "EPOS Studio" verfügt über einen sogenannten "Regulation Tuning" Wizard für die automatische Ermittlung der Reglerparameter des komplexen "Dual Loop Regler" Algorithmus.
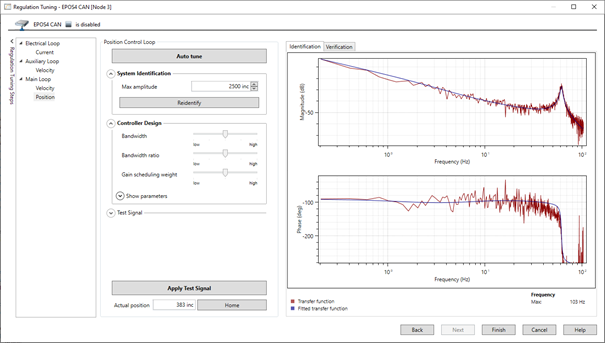
Die aufgezeichneten Bode Diagramme der Übertragungsfunktion des Antriebsstrangs können exportiert werden. Diese Daten können von Regelungstechnikern analysiert oder als Grundlage für die manuelle Parameteroptimierung auf spezifische Anwendungsanforderungen genutzt werden.
Ergänzende Dokumente im Zusammenhang mit "Dual loop" Aspekten:
Kommentare
0 Kommentare
Zu diesem Beitrag können keine Kommentare hinterlassen werden.