
Topic:
- What means PWM controlled motor power?
- Why does a PWM motor voltage result in some current ripple or can even heat up the motor windings in addition?
- What is the difference in between the 2-level and 3-level PWM scheme?
Solution:
1.) PWM controlled motor voltage
Pulse width modulated (PWM) outputs of power stages for motor control are state of the art nowadays. The power stage switches the motor voltage ON and OFF resp. in between the positive and negative supply voltage in very fast intervals. The PWM frequency is typically in the range of 20 kHz up to 100 kHz.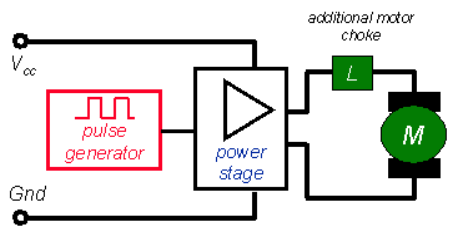
The motor voltage is not controlled by some internal voltage drop by an variable "electronic resistor" (like by linear power stages in former times) but it is based on permanently very fast switching of the motor's supply voltage by the MOSFETs of a so-called H-bridge. This results in an adapted averaged motor voltage during each PWM cycle which determines the motor speed.
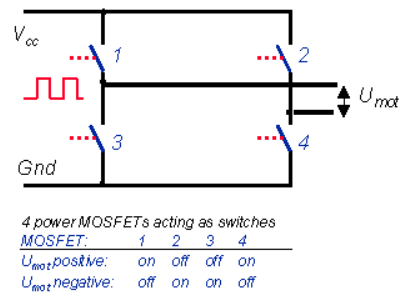
The losses in the power electronics are very small by such a PWM-controlled design because each MOSFET acts like an ON/OFF switch. This means that the MOSFET is either switched off (i.e. no current flow through this path of the H-bridge) or the MOSFET is in fully conducting state (i.e. its internal resistance is close to 0 Ohm and there is no power dissipation present).
The advantage of PWM controlled power stages in general is its very high efficiency (up to 98% or more) and the very compact dimensions without extensive heating up the electronics even at high currents.
In the motor however, PWM controlled power stages cause a current ripple which produces power losses in winding and eddy current losses in the iron core. As a result the motor may heat up in addition. In case of a 2-level PWM it is possible that there is some remarkable heating present even at stand-still without any torque output of the motor (like explained later).
2.) PWM & Current ripple
2.1.) PWM results in current ripple
The sign of the voltage applied to the motor winding(s) changes all the time within each PWM cycle, i.e. typ. at a rate of 50 ... 10 microseconds (corresponding to 20 kHz ... up to 100 kHz PWM frequency). The resulting averaged motor voltage within each PWM cycle depends on the time ratio of the phases with positive and negative supply voltage of the motor. This ratio is called "PWM duty cycle". The resulting averaged motor voltage based on the "PWM duty cycle" defines the motor speed finally.
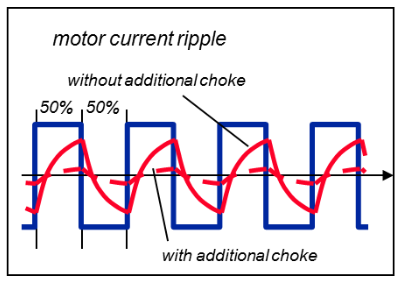
The permanent switching in between two voltage levels (i.e. turning the sign of the applied motor voltage within each PWM cycle) results in some current ripple.
The maximum peak-to-peak current ripple depends on different factors like ...
-
Supply voltage
The higher the supply voltage, the higher the current ripple. -
Total inductance of the motor windings plus motor chokes (if present)
The higher the inductance, the lower the current ripple. -
PWM frequency
The higher the PWM frequency, the lower the current ripple.
This motor current ripple ...
- ... results in some current flow through the windings which is not relevant for the torque output but heats up the motor windings in addition.
Please refer to the following linked article to find more information about motor heating:
On the heating of motors (in hand-held tools)
- ... can be reduced by additional external motor chokes.
Please refer to the following linked article to learn more about the calculation of the current ripple and some estimation about required external motor chokes:
PWM power stage: Current ripple & Motor chokes
2.2.) Measures to reduce the current ripple
-
Reduce the supply voltage of the power stage as long as the motor voltage is still sufficient to reach the motor speed required by your application.
Find some more information about supply voltage and motor speed aspects by the following linked article:
What supply voltage is required by a controller?
-
Increase the total inductance,
e.g. by adding an additional motor choke or choosing a controller with integrated motor chokes (like present by maxon's ESCON or EPOS4 housed or Compact product types).
-
Choose a modern controller with a high PWM frequency.
Typically at least 50 kHz is recommended for maxon motors.
All maxon's ESCON and EPOS4 product types have a PWM frequency in between 50 ... 100 kHz.
-
Choose a modern controller with a "3-level PWM" scheme.
maxon's ESCON and EPOS4 are based on "3-level PWM".
Just the "ESCON EC-S" (= sensorless control & commutation) is an exception and uses a 2-level PWM.
3.) PWM schemes
There are mainly two different principles present concerning the motor PWM scheme. These principles are called "2-level PWM" and "3-level PWM".
There are just some old controller designs present at maxon which are still based on the "2-level PWM" (e.g. "DEC 70/10", ADS, MIP). These "2-level PWM" controllers are in NRND state (-> "Not recommended for New Designs") or even not available anymore.
The modern but more complex "3-level PWM" design is in use by (almost) any up-to-date maxon controller product line (e.g. ESCON, EPOS2, EPOS4, MAXPOS, ...). Just the "ESCON EC-S" is an exception due to the fact that 2-level PWM is in use for Back-EMF detection required by sensorless winding commutation.
3.1.) 2-level (or 2-point) PWM
In case of a "2-level PWM" (also called "conventional bipolar PWM") the applied motor voltage switches (or toggles) just in between the two levels of the positive and negative supply voltage of the power stage.
Technical aspects:
If the motor is in standstill and no output torque has to be delivered, the PWM duty cycle will be 50% and the motor voltage is oscillating in between the positive and negative supply voltage of the power stage. The resulting averaged motor voltage is 0V in this case. Nevertheless there is still an internal current flow (= current ripple) present due to voltage rise and drop within the motor windings during each PWM cycle. This current ripple heats up the motor (even without any torque output at the motor shaft).
Advantages of a "2-level PWM":
- The design and control of the required electrical circuits is simple.
- The dynamic properties are slightly better in theory by a "2-level PWM" than in case of "3-level PWM". Anyway this is more a minor theoretical aspect than actually relevant in practice.
Disadvantages of a "2-level PWM":
- The maximum current ripple of a "2-level PWM" is twice the maximum current ripple of a "3-level PWM".
- The worst case current ripple is at standstill. This is quite strange for lots users because the motor heats up although the motor is in standstill and no torque output is present.
Current ripple calculation of a "2-level PWM":
3.2.) 3-level (or 3-point) PWM
The difference of a "3-level PWM" compared to "2-level PWM" is that there is an additional (= “third”) state with a PWM level of actually 0V. This will be the case if the motor is in standstill without any torque demands (i.e. identical to the operating point for which the "2-level PWM" has to oscillate the motor voltage with 50% PWM duty cycle.)
Technical aspects:
There is no PWM voltage oscillation present in this case of standstill and no load demand. The PWM motor voltage stays actually at 0V (like PWM switched off). This results in the fact that there is no current ripple possible at that state.
Advantages of a "3-level PWM":
- The amplitude of the current ripple is very small, if the back EMF is close to zero (motor at stand-still), i.e. there is no motor heating up at that operating point.
- The maximum current ripple of a "3-level PWM" is just half the maximum current ripple of a "2-level PWM".
Current ripple calculation of a "3-level PWM":
3.3.) Comparison of 2-level and 3-level PWM
-
"2-level PWM":
Highest current ripple at standstill. -
"3-level PWM":
Highest current ripple at a motor voltage Umot that is 50% of the power stage supply voltage Vcc.
Cross Reference:
- Video: "PWM power stages and motor heating"
- Support Center document: "PWM power stage: Current ripple & Motor chokes"
Comments
0 comments
Article is closed for comments.