
Topic:
Any PWM motor power output of controllers and amplifiers leads to a so-called current ripple in case of low inductance motors. This document provides different aspects and measures to reduce this current ripple.
Situation:
Most modern motor controllers and amplifiers are based on a PWM power output adapting the required motor voltage by a PWM pulse width modulation. The PWM controlled motor voltage leads to a current ripple that reflects the increasing and decreasing current inside the winding each PWM cycle. The current ripple can be one factor of heating up of the motor windings (even at standstill or without a load attached). The maximum peak-to-peak level (Ipp) of the current ripple depends on different factors.
Current Ripple: Influencing factors
- The PWM frequency fPWM of the amplifier:
The higher the frequency the smaller the current ripple.
- The PWM scheme used by the amplifier:
4-Q amplifiers with 2-Level PWM sheme show a higher current ripple than 1-Q amplifiers or 4-Q amplifiers with 3-Level PWM scheme.
- The supply voltage VCC:
The smaller the supply voltage the smaller the current ripple.
- The effective total inductance Ltot of the motor windings and possibly existing motor chokes:
The higher the inductance Ltot the smaller the current ripple.
- The load with respect to the max. continuous (nominal) current Icont of the motor (see catalog):
The smaller the load the higher the current ripple may be without overloading the motor.
Solution: Motor chokes
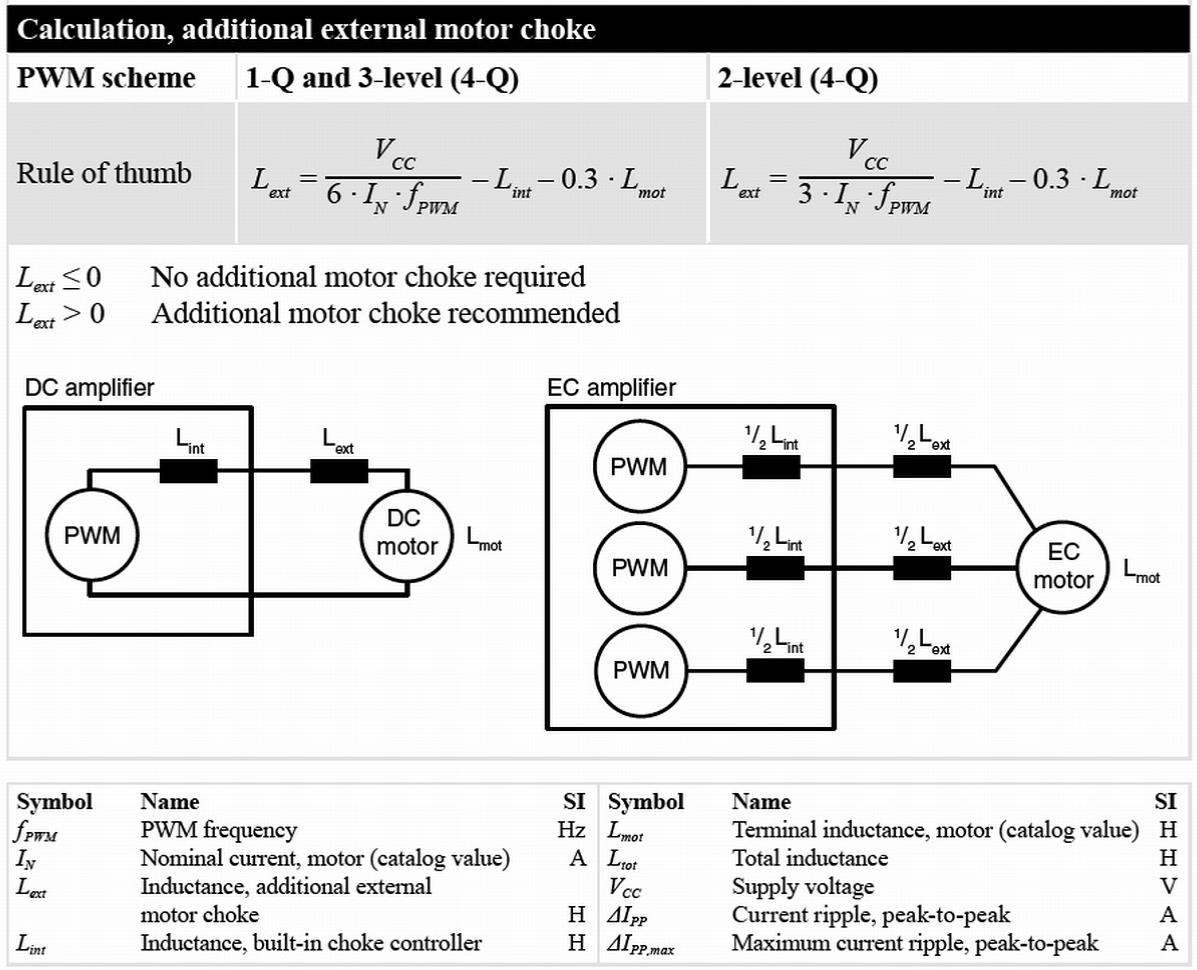
Additional chokes (in addition to the inductance of the motor winding) can reduce the current ripple strongly. Such motor chokes can be integrated directly in the power stage of the controller (like typically done by maxon) or can be connected externally in series to the motor windings. There are different benefits by the usage of motor chokes:
- Motor chokes protect the motor from overheating due to a too large current ripple:
The choke reduces the current ripple caused by the PWM and the additional heat production is lowered by this.
- In special cases motor chokes may be necessary to guarantee the stability of the current control loop:
There is sometimes a "Minimum terrminal inductance" specified by the controller.
- Motor chokes prevent the amplifier’s peak current limitation to be tripped unmeant, e.g. in case of "DEC Module 24/2" and "DEC Module 50/5" operated with low-inductance motors at high voltages.
- Motor chokes are strongly recommended when operating brush DC motors with CLL disks in case of amplifiers without built-in motor chokes.
Calculation of the current ripple:
(Extract of maxon's "Formulae Handbook")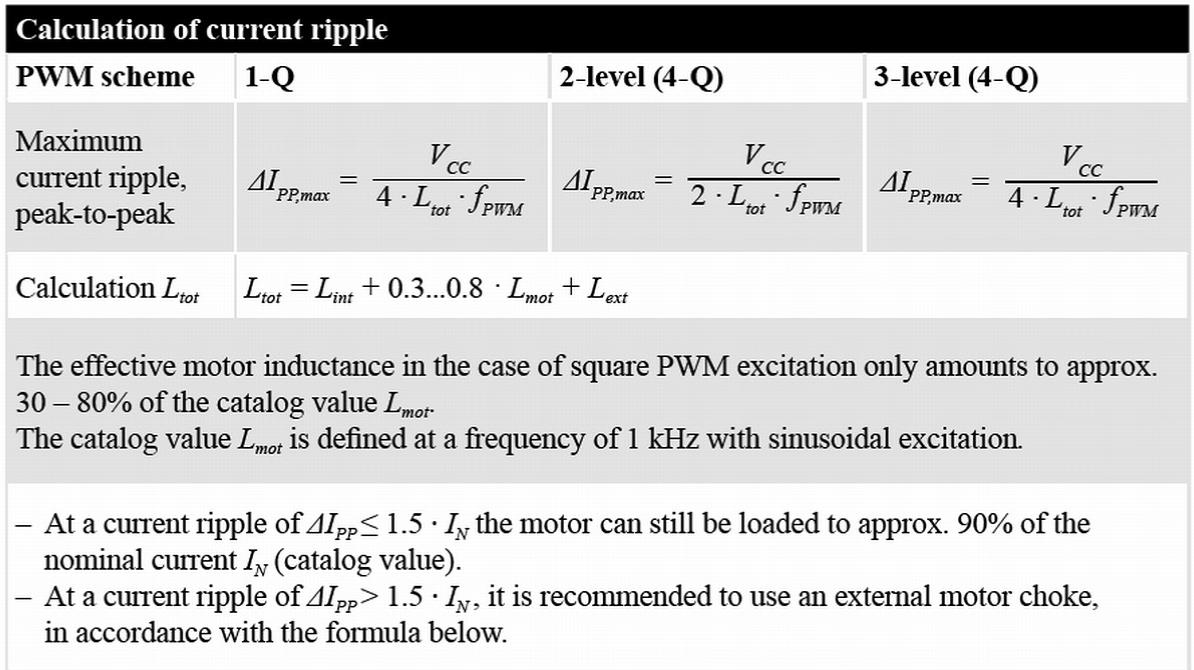
Rules of thumb:
- maxon's 4-Q controllers use a 3-level PWM scheme, therefore the formulae
Ipp = Vcc / (4 * Ltot * fpwm)
can be used to determine the current ripple which is valid for 1-Q and 4-Q (3-level PWM) controllers.
- The effective inductance of the motor windings in case of a PWM frequency of 50 - 100 kHz will be just 30-80% of the value specified in the motor data sheet (which is based on a 1 kHz frequency only). Therefore calculate the actual inductance of the motor by multiplying the specified value by 0.3.
- Do not miss the inductance of the internal motor chokes of the controller to calculate the total inductance Ltot. There are always just two of the internal chokes (phase-to-phase) active.
- If Ipp is lower than 1.5 times of the motor's nominal current (see motor data sheet) and the motor load is less than 90% of the specified nominal torque, there is no additional external motor choke required.
Example:
- Motor: ECi-40, #449464
Nominal current: 2.8 A
Terminal inductance: 0.39 mH
- ESCON 50/5, #409510
PWM frequency: 53.6 kHz
Built-in motor choke: 3 x 30 µH
- Supply voltage in use:
Vcc: 24 V
- Total inductance:
Ltot = (0.3 * 0.39 mH) + (2 * 0.03mH)
Ltot = 0.177 mH
- Current ripple:
Ipp = Vcc / (4 * Ltot * fpwm)
Ipp = 24V / (4 * 0.177mH * 53.6kHz)
Ipp = 0.63 A
- Conclusion:
The current ripple (= 0.63A) is much less than the specified motor’s nominal current (= 2.8A), i.e. there are no additional measures (e.g. external motor chokes) required for operation.
Estimation about the need of external motor chokes:
Remark:
maxon controllers use high PWM frequencies (50 – 100 kHz) based on a 3-level PWM scheme, and there are often built-in motor chokes present optimized for the typically range of motors in use. Finally this reduces external wiring and reduces total costs of a system if there is no need for external motor chokes anymore.
Quite often there will be no need for external motor chokes if maxon controllers are in use. Anyway the formulaes above have to be taken into account to confirm this especially in case of a too hot motor or in case of using so-called "Module" product types without internal motor chokes.
More information: Attached documents!
Please note the following attached documents which provide more detailed information and an overview of the relevent technical data of the maxon controllers and amplifiers:
-
DEUTSCH_MotorDrosselBerechnung_V1-00de.pdf
German document version of the additional and more comprehensive information about current ripple calculation based on technical data of the maxon controllers.
Identical content like the English version of the document.
-
ENGLISH_MotorChokeCalculation_V1-00en.pdf
English document version of the additional and more comprehensive information about current ripple calculation based on technical data of the maxon controllers.
Identical content like the German version of the document.
-
ENGLISH_PWM-and-Motor-Heating_V1-00en.pdf
Additional in-depth information about current ripple and motor heating up due to current ripple.
This document is just available in English.
Cross Reference:
- Video "PWM power stages and motor heating"
- Support Center document: "PWM, PWM scheme (2 level, 3 level), Current ripple, Motor heating"
Comments
0 comments
Article is closed for comments.