
Inkrementalencoder haben zwei Kanäle (A und B)? Warum und welcher Kanal kommt zuerst in Abhängigkeit der Drehrichtung?
Inkremental-Encoder, wie sie maxon einsetzt, erzeugen eine Folge von elektrischen hoch-tief Impulsen. Die Steuerung wertet diese Impulsfolge aus und kann daraus die Informationen gewinnen
- um wieviel (um welchen Winkel) die Motorwelle gedreht hat (Anzahl Pulse zählen)
- wie schnell die Motorwelle dreht (z.B. Anzahl Pulse pro Millisekunde)
Allerdings sieht das Signal genau gleich aus, ob der Motor im Uhrzeigersinn (cw) oder im Gegenuhrzeigersinn (ccw) dreht. Deshalb wird ein zweiter Kanal B (eine zweite Impulsfolge) benötigt, dessen Signal um 90° elektrisch (°e) gegenüber dem Kanal A verschoben ist.
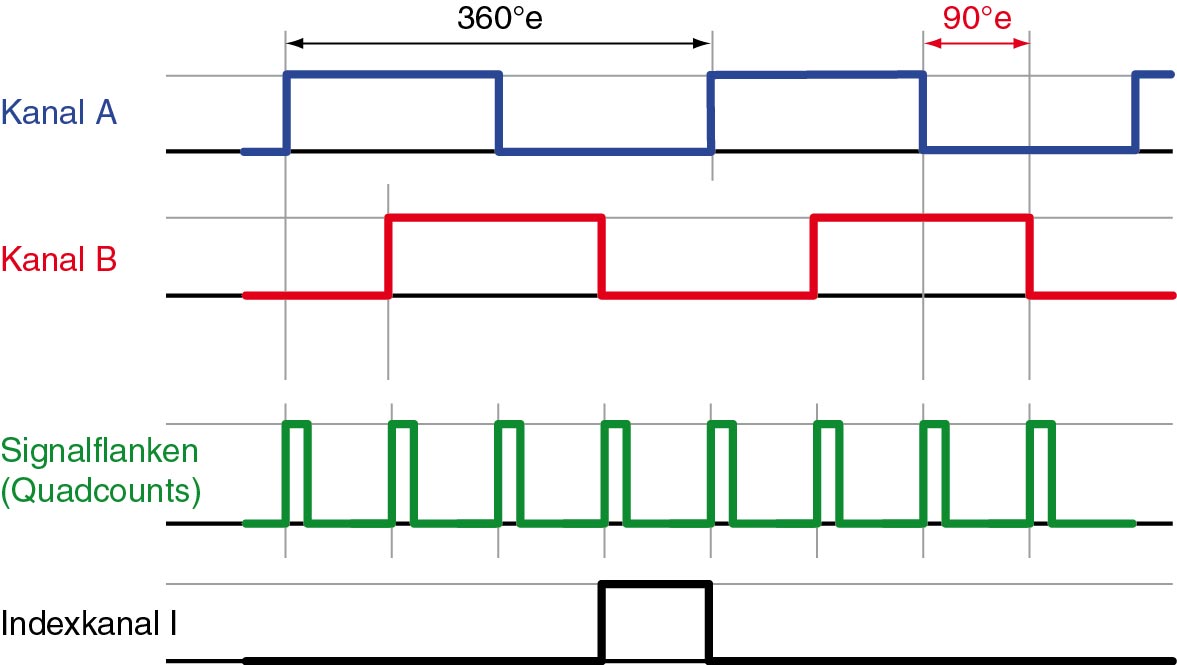
Diese Phasenverschiebung wird benötigt um die Drehrichtung zu bestimmen. Je nach Drehrichtung eilt nun die Impulsfolge A der Impulsfolge B voran, oder umgekehrt. Für Encoder im maxon Katalog (falls nicht anders spezifiziert) gilt folgende Festlegung:
- Dreht die Welle im Uhrzeigersinn (CW), so führt der Kanal A vor dem Kanal B.
- Dreht die Welle im Gegenuhrzeigersinn (CCW), so führt der Kanal B vor dem Kanal A.
Festlegung der Drehrichtung bei maxon Motoren
Man betrachtet die Drehrichtung der Welle von aussen auf die Stirnseite (Montage-/Lastseite) des Motors betrachtet.
Quadcounts erhöhen die Auflösung
maxon Steuerungen werten die Signalflanken des Encoder Signals aus. Dadurch ergibt sich in Bezug zur Impulsanzahl des Encoders eine vierfach höhere Positionierauflösung. Man spricht in diesem Fall von sogenannten Quadcounts oder Zuständen.
Kommentare
0 Kommentare
Zu diesem Beitrag können keine Kommentare hinterlassen werden.