
Topic:
- What can be a possible cause of sporadic "Overvoltage" messages?
- What can cause error states during control parameter tuning?
- Was can be a possible cause for error state or bad control especially during deceleration?
- What measures have to be taken in case of a motor partly operated as a generator?
Situation:
A motor might not just consume energy. It can also generate energy when it comes to the point that a load has to be decelerated. There is energy reversed from the motor (which is operating like a generator during deceleration) to the power stage of the motor controller. The motor controller reverse this energy mainly into the power supply (or battery) then.
A limited amount of reversed energy can be buffered by internal capacitors of the motor controller and power supply. If there is a long phase or lot of energy recovery present, the buffering might not be possible anymore and the supply voltages increases by this. It is possible that the power supply switches off (for some 100 milliseconds) again and again to protect itself or the the motor controller might report an “Overvoltage” error state and disables the power stage, i.e.there will be no controlled deceleration possible anymore.
Typical applications or systems where energy recovery gets a topic:
- Crane or lift applications in case of moving the load downwards.
- Centrifuge
because of the high inertia. - Direct drives with a high inertia (= big diameter) of a rotative load
e.g. disk-shaped or cylindrical load - Mechanical systems with a low friction and / or external force in one direction
e.g. vertical axis, spring-loaded drives, hydraulic or compressed loads, … - Systems with a compact or wall wart power supply e.g. power supplies
which are typically in use for home or office applications.
Typical signs of a too high energy recovery:
- Error states during control parameter tuning.
- Short supply voltage break downs of the power supply
(in the range of some 100 milliseconds) which can just be detected by an oscilloscope. - “Overvoltage” error messages of the motor controller
esp. during deceleration phase or a vertical movement downwards. - Instable control or error messages / problems
during deceleration or a vertical movement downwards.
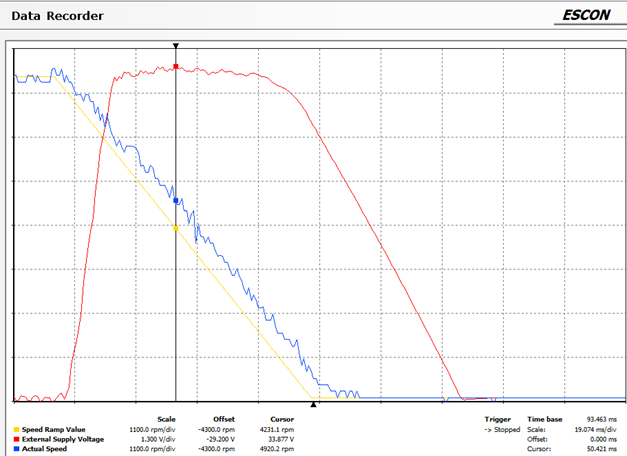
Example:
Voltage rise from 24V up to 34V (red curve)
during a deceleration phase (yellow and blue curve):
Solution:
There are different single or combined measures which can help to cope with a high amount of energy recovery, e.g. by buffering the energy or consuming it by other components.
1.) Selection of the power supply
Do not use any extreme compact or wall wart power supplies which have been designed for home and office applications (e.g. power supplies of notebooks). These power supplies are not(!!) suitable for energy recovery which will take part for all kind of drive systems (i.e. even for low power motors) during deceleration phase.
A proper choice of an industrial power supply with sufficiently dimensioned buffering capacitors can already solve problems and error messages caused by reversed energy.
2.) Additional capacitors
An external capacitor in between the Plus / Minus supply lines close to the controller can help to buffer a limited amount of reversed energy.
Typically there are capacitors of 47000 µF capacitors in use for that. It is important that the capacitor’s voltage rating can cope with the maximum supply voltage level plus some reserve (of at least 20-50%), e.g. use at least a 47000 µF / 70V capacitor in case of a 48V supply.
3.) Mixing power consumers and "generators"
Best case will be if a common power supply is in use for multiple devices, e.g. motors operating in deceleration phase while other devices (or motors) consuming the reversed energy.
There is no need to use different power supplies exclusively for single drives. This is even a drawback. A mixture of motors in different motion states (i.e. not all of these decelerate at the same time) supplied by one common powerful supply offers a good balance of "generators" (reversing energy) and "consumers". Finally this results in a good energy efficiency and there might be no need and extra costs for additional energy recovery measures.
4.) Configuration of deceleration profiles
a) Deceleration ramp
If the slope of deceleration ramps can be reduced without any drawback concerning application requirements, this can reduce the supply voltage rise and solve “Overvoltage” problems without any additional measures in the best case.
b) Multiple deceleration drives
If there are multiple drives in use within a system and all of these are starting deceleration exactly at the same time, this results in an accumulated high initial peak of returned energy. If it is possible to start the deceleration phase of each motor just a little bit time-shifted, the total amount of energy is averaged more constant over a longer period of time and the accumulated high energy peak at start is reduced.
5.) Supply voltage
If an “Overvoltage” message is present due to energy recovery, it is recommend to aim for a difference of at least 10 Volt in between the supply voltage and the maximum specified voltage of the motor controller.
If possible, the supply voltage should be reduced by adjusting it more closely to the maximum required speed depending on application requirements. There is a general rule of thumb to estimate the minimum supply voltage:
Supply voltage = (Max. speed requirement / Speed constant of the motor) x 1.2
Another possibility will be to choose a motor controller offering a higher maximum supply voltage (e.g. 70V instead of 50V) and increasing the margin in between the power supply voltage (e.g 50V) and the “Overvoltage” error state.
6.) Brake chopper / Shunt regulator
If some or even all of the mentioned measures still cannot fully solve the problem due to the amount of reversed energy, a shunt regulator (or so-called brake chopper) has to be installed to consume the reversed energy, e.g. "maxon DSR 50/5" (#309687) or "maxon DSR 70/30" (#235811).
There can be one shunt regulator in use for multiple drives depending on the amount of reversed energy. The shunt regulator has to be placed in the supply voltage line in between the power supply and the controller.
Some guidance based on your concrete application required?
If you need some investigation focused on your concrete application, please open a request and provide us much information as possible about your application, your system, the load and motion profiles. Please find a check list of information which is required in the document "What information is required by support".
Englisch and German PDF:
There is even some more detailed information and explanations present in these documents:
Comments
0 comments
Article is closed for comments.